
陈黎明在演讲中提到,自动驾驶对整个汽车技术提出了巨大的挑战和机会。SAE对技术路线提出了可行的技术方案,中国是自动驾驶的巨大市场。

总体来说,自动驾驶在周边感知、系统架构、法律、伦理等方面,还有很多问题尚待解决。核心问题是——怎么提供安全车辆,把我们从A点安全带到B点。
陈黎明在演讲中重点提到了系统、责任、场景、冗余等关键问题。
系统
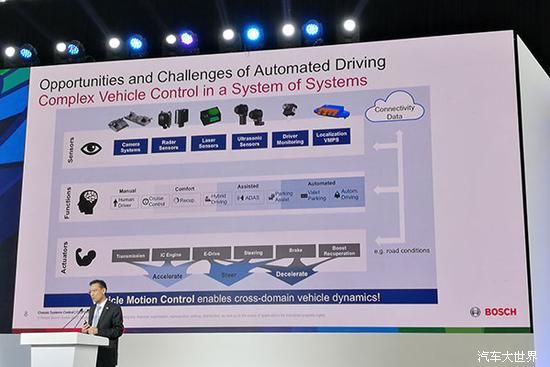
自动驾驶是目前最复杂的控制系统,需要对所有的控制执行器做高度整合。自动驾驶不仅需要传感定位对周围环境的检测,还要对环境和对周边人车关系的理解,再作出下一步的控制。目前所有技术产品中,除了制动系统可以完成L3-L5的技术,其他技术还没有达到量产阶段的支持。大家谈的比较多的是某一项技术,没有谈到怎么把所有的软硬件集成到一起,释放到市场上,这样还是等于纸上谈兵。
责任
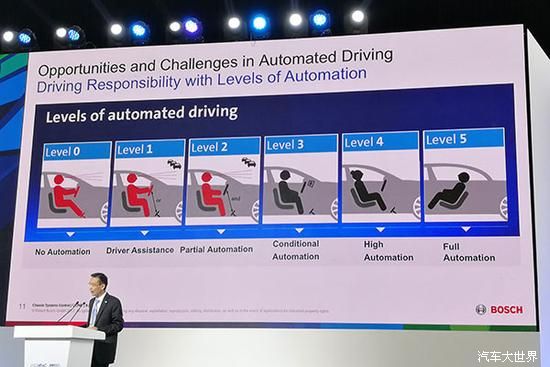
自动驾驶是功能增加和复杂程度的增加,不是简单地量变。尤其是L2到L3是质变,L0-L2级自动驾驶的责任在人,L3级以上驾驶责任在车。自动驾驶的责任从人转移到了系统。
场景
以前都是在简单的场景,L4-L5要覆盖所有驾驶场景,利用时间做别的事情。这就需要考虑系统失效了怎么办,电源、传感、决策、执行机构都需要冗余。半自动驾驶到全自动驾驶,需要经历从失效安全到失效操作的改变。

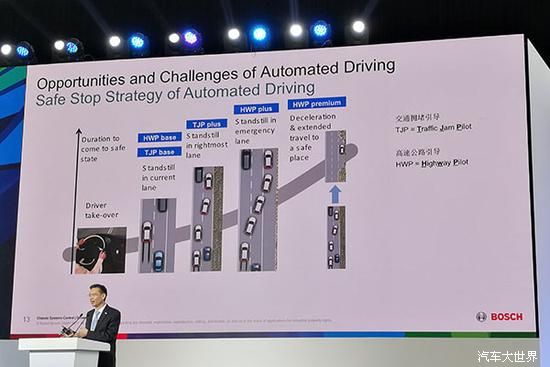
陈黎明在现场举例了失效怎么处理。车辆在道路上行驶,能不能安全停下来。中速情况,至少要允许安全变到右侧车道。高速情况下,要停到停车道。最安全的情况,要停到休息区域。
冗余
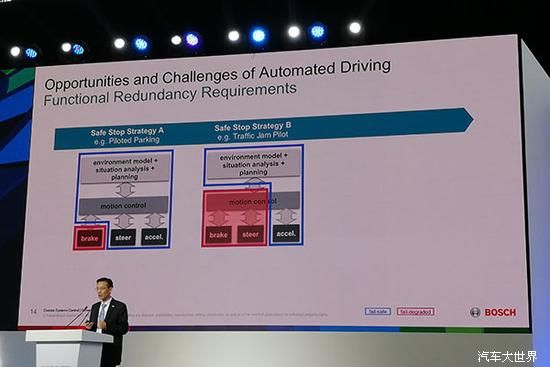
低速自动驾驶要有制动冗余。中速,高速的自动驾驶冗余要求会相应增加。
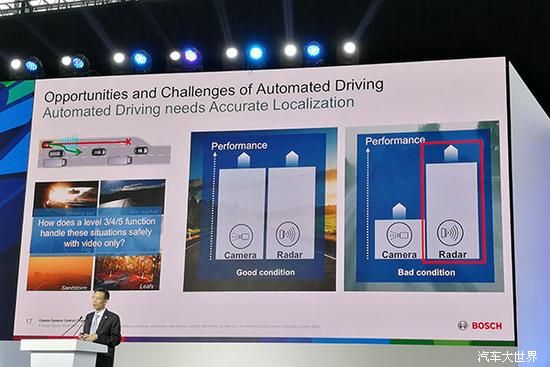
在传感器方面,仅用摄像头和毫米波雷达还是有局限,激光是必须需要的传感器。
没有精确定位,还是不能完全自动驾驶,各种天气如何定位。目前定位使用的主流传感器是摄像头,遇到天气不好的情况会看不到,博世道路特征可以借助摄像头和毫米波雷达用于定位,做到在任何天气把周边都看的比较清楚。
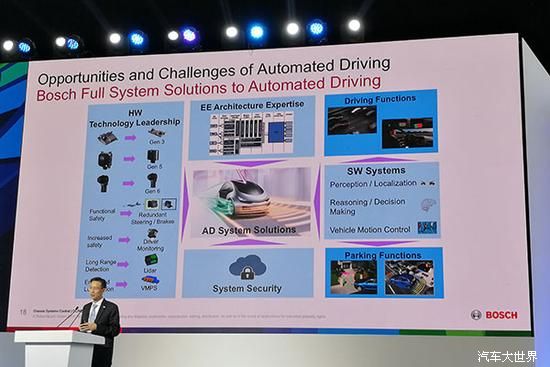
陈黎明在最后表示,自动驾驶是一步步实现的,博世可以提供系统级的解决方案,目前博世的城市自动驾驶系统正在研发中。













评论